流体力学的数学基础
数学基础
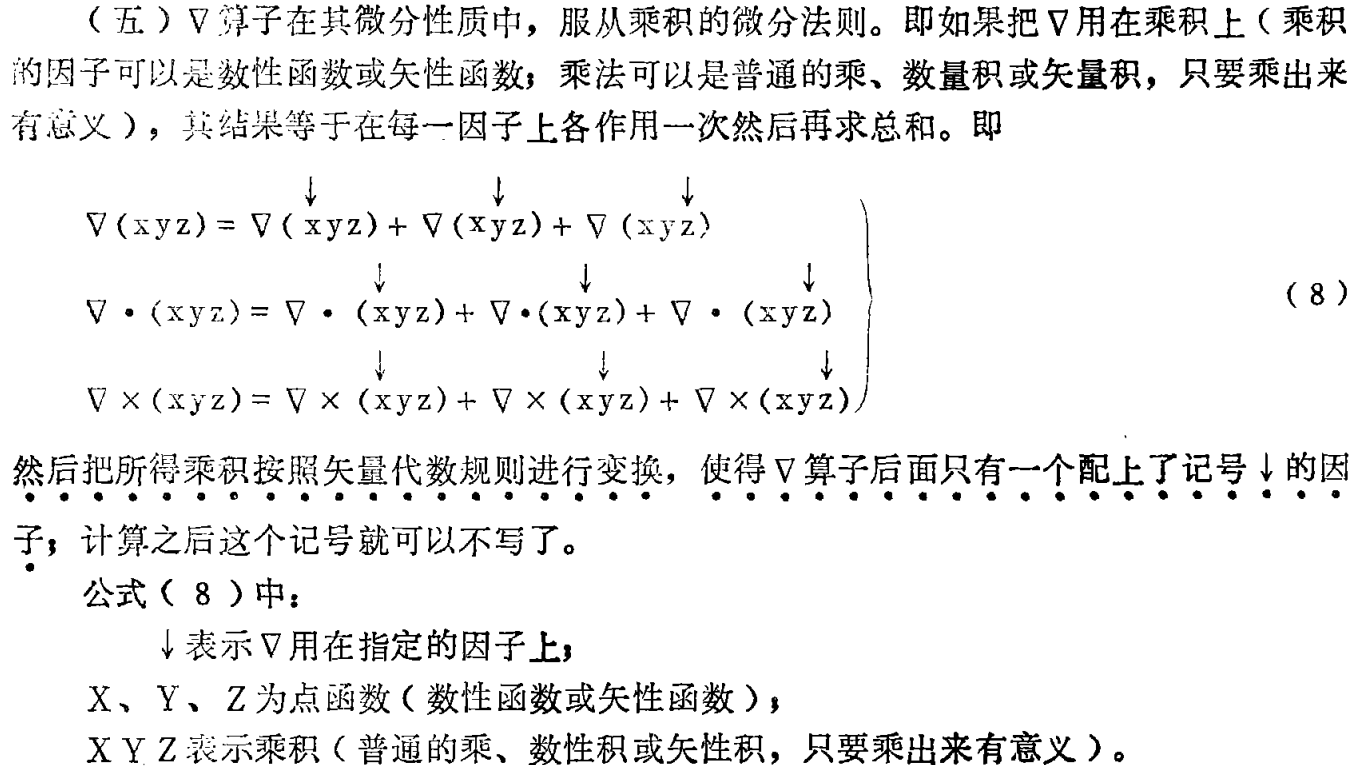
本文绝大部分内容都是摘抄自参考文献
微分学基础
- 显然,为精确计,对于函数\(f(x)\),有
\[ \frac{\Delta y}{\Delta x}=f'(x_0)+\alpha, \ \lim_{\Delta x \to 0}\alpha=0 \]
在这个基础上,可以通过繁复的证明,得到 \[ \Delta z=f'_x(x_0,y_0)\Delta x +f'_y(x_0,y_0)\Delta y +o(\rho) \] 而同样的,对于函数\(u(x,y,z)\)可以得到 \[ \Delta u=u'_x \Delta x+u'_y \Delta y+u'_z \Delta z+o(\rho) \]
对于多元函数\(u(x,y,z)\),若其在点\(P_0(x_0,y_0,z_0)\)处可微,则u在点\(P_0\)处沿任意方向\(\boldsymbol{l}\)的的方向导数都存在,且 \[ \frac{\partial u}{\partial \boldsymbol{l}}\bigg|_{P_0}=\frac{\partial u}{\partial x}\bigg|_{P_0}cos\alpha+\frac{\partial u}{\partial y}\bigg|_{P_0}cos\beta+\frac{\partial u}{\partial z}\bigg|_{P_0}cos\gamma \] 其中,方向\(\boldsymbol{l}\)上的单位矢量: \[ \boldsymbol{l}^0=\{ cos\alpha,cos\beta,cos\gamma\} \] 证 设\(P(x,y,z)\)为\(\boldsymbol{l}\)上任一点,由 \[ \overrightarrow{P_0 P}=\{x-x_0, y-y_0,z-z_0\}=\{\Delta x,\Delta y,\Delta z\} \] \(\overrightarrow{P_0 P}=\{\frac{\Delta x}{\rho},\frac{\Delta y}{\rho},\frac{\Delta z}{\rho}\}=\boldsymbol{l}^0\),其中\(\rho=\sqrt{(x-x_0)^2+(y-y_0)^2+(z-z_0)^2}\),得 \[ \frac{\Delta x}{\rho}=cos\alpha,\ \frac{\Delta y}{\rho}=cos\beta,\ \frac{\Delta z}{\rho}=cos\gamma,\ \]
由于\(u(P)\)在点\(P_0\)处可微,利用1,所以 \[ \begin{aligned} u(P)-u(P_0)=& u(x_0+\Delta x,y_0+\Delta y,z_0+\Delta z)-u(x_0,y_0,z_0)\\ =& \frac{\partial u}{\partial x}\bigg|_{P_0}\Delta x+\frac{\partial u}{\partial y}\bigg|_{P_0}\Delta y+\frac{\partial u}{\partial z}\bigg|_{P_0}\Delta z +o(\rho) \end{aligned} \] 上式两端同除以\(\rho\),可得 \[ \begin{aligned} \lim_{\rho \to 0}\frac{u(P)-u(P_0)}{\rho}= &\lim_{\rho \to 0}(\frac{\partial u}{\partial x}\bigg|_{P_0}\frac{\Delta x}{\rho}+\frac{\partial u}{\partial y}\bigg|_{P_0}\frac{\Delta y}{\rho}+\frac{\partial u}{\partial z}\bigg|_{P_0}\frac{\Delta z}{\rho}+\frac{o(\rho)}{\rho})\\ =& \frac{\partial u}{\partial x}\bigg|_{P_0}cos\alpha+\frac{\partial u}{\partial y}\bigg|_{P_0}cos\beta+\frac{\partial u}{\partial z}\bigg|_{P_0}cos\gamma \end{aligned} \] 于是 \[ \frac{\partial u}{\partial \boldsymbol{l}}\bigg|_{P_0}=\frac{\partial u}{\partial x}\bigg|_{P_0}cos\alpha+\frac{\partial u}{\partial y}\bigg|_{P_0}cos\beta+\frac{\partial u}{\partial z}\bigg|_{P_0}cos\gamma \]
(梯度)为了研究函数沿任意方向的最大变化率,提出梯度的概念。由于 \[ \begin{aligned} \left.\frac{\partial u}{\partial \boldsymbol{l}}\right|_{P_0} & =\left.\frac{\partial u}{\partial x}\right|_{P_0} \cos \alpha+\left.\frac{\partial u}{\partial y}\right|_{P_0} \cos \beta+\left.\frac{\partial u}{\partial z}\right|_{P_0} \cos \gamma \\ & =\left.\left(\frac{\partial u}{\partial x}, \frac{\partial u}{\partial y}, \frac{\partial u}{\partial z}\right)\right|_{P_0} \cdot(\cos \alpha, \cos \beta, \cos \gamma), \end{aligned} \] 所以可以把\(\frac{\partial u}{\partial \boldsymbol{l}}|_{P_0}\)看成两矢量的数量积。从而记函数\(u(P)\)在点P处的梯度为\(\boldsymbol{\operatorname{grad}}u\),即 \[ \boldsymbol{\operatorname{grad}} u=\frac{\partial u}{\partial x} i+\frac{\partial u}{\partial y} j+\frac{\partial u}{\partial z} k=\left(\frac{\partial u}{\partial x}, \frac{\partial u}{\partial y}, \frac{\partial u}{\partial z}\right), \] 于是 \[ \begin{aligned} & \boldsymbol{\operatorname{grad}} u\left(P_0\right)=\left(\left.\frac{\partial u}{\partial x}\right|_{P_0},\left.\frac{\partial u}{\partial y}\right|_{P_0},\left.\frac{\partial u}{\partial z}\right|_{P_0}\right)=\left.\boldsymbol{\operatorname{grad}} u\right|_{P_0}=\left.\left(\frac{\partial u}{\partial x}, \frac{\partial u}{\partial y}, \frac{\partial u}{\partial z}\right)\right|_{P_0}, \\ &\left|\boldsymbol{\operatorname{grad}} u\left(P_0\right)\right|=\left.\sqrt{\left(\frac{\partial u}{\partial x}\right)^2+\left(\frac{\partial u}{\partial y}\right)^2+\left(\frac{\partial u}{\partial z}\right)^2}\right|_{P_0}, \end{aligned} \] 从而 \[ \begin{aligned} \left.\frac{\partial u}{\partial \boldsymbol{l}}\right|_{P_0} & =\boldsymbol{\operatorname{grad}} u\left(P_0\right) \cdot \boldsymbol{l}^0 \\ & =\left|\boldsymbol{\operatorname{grad}} u\left(P_0\right)\right| \cdot\left|l^0\right| \cos \theta \\ & =\left|\boldsymbol{\operatorname{grad}} u\left(P_0\right)\right| \cos \theta, \end{aligned} \] 其实\(\theta\)是矢量\(\boldsymbol{\operatorname{grad}}u(P_0)\)与\(\boldsymbol{l}\)的夹角
(曲线方程的法矢量)设存在曲线方程\(z=z(x,y)\),将其变换为\(u=z-z(x,y)=0\),我们可以很自然地相像与之称缩放关系的一系列曲线方程围成的平面集合\(u=z-z(x,y)=C\)。根据梯度的意义,\(\boldsymbol{\operatorname{grad}}u\)就是函数\(u(P)\)最大变化率的方向,且其有且只有一个。考虑到在曲线方程的选定一点上的向外(即向着\(u(P)\)增大方向)的法矢量也是有且只有一个,而法矢量向任一侧的偏移都会导致增加过程中划给了没必要的等值面的增加部分,因而,梯度就是这里的法矢量。一般的,我们可以列出,对于曲线方程\(u(p)=u(x,y,z)\),其法矢量为 \[ \boldsymbol{n}=(u_x,u_y,u_z) \]
(泰勒定理) 若函数 \(f\)在点\(P_0(x_0,y_0)\)的某领域\(U(P_0)\)内有直到\(n+1\)阶的连续偏导数,则对于\(U(P_0)\)内任一点\((x_0+h,y_0+k)\),存在\(\theta \in (0,1)\),使得 \[ \begin{aligned} f\left(x_0+h, y_0+k\right)= & f\left(x_0, y_0\right)+\left(h \frac{\partial}{\partial x}+k \frac{\partial}{\partial y}\right) f\left(x_0, y_0\right) \\ & +\frac{1}{2 !}\left(h \frac{\partial}{\partial x}+k \frac{\partial}{\partial y}\right)^2 f\left(x_0, y_0\right)+\cdots \\ & +\frac{1}{n !}\left(h \frac{\partial}{\partial x}+k \frac{\partial}{\partial y}\right)^n f\left(x_0, y_0\right) \\ & +\frac{1}{(n+1) !}\left(h \frac{\partial}{\partial x}+k \frac{\partial}{\partial y}\right)^{n+1} f\left(x_0+\theta h, y_0+\theta k\right) \end{aligned} \] 这称作二元函数\(f\)在点\(P_0\)处的\(n\)阶泰勒公式。(证明略)
二重叉积恒等式 \[ \vec{u}\times(\vec{v}\times\vec{w})=(\vec{u}\cdot\vec{w})\vec{v}-(\vec{u}\cdot\vec{v})\vec{w}\\ (\vec{u}\times\vec{v})\times\vec{w}=(\vec{u}\cdot\vec{w})\vec{v}-(\vec{w}\cdot\vec{v})\vec{u} \] 证 设 \(\boldsymbol{a}=a_1 \boldsymbol{i}+a_2 \boldsymbol{j}+a_3 k, \boldsymbol{b}=b_1 \boldsymbol{i}+b_2 \boldsymbol{j}+b_3 k, \boldsymbol{c}=c_1 \boldsymbol{i}+c_2 \boldsymbol{j}+c_3 k\), 有 \[ \begin{aligned} \boldsymbol{a} \times(\boldsymbol{b} \times \boldsymbol{c})= & {\left[\left(b_1 c_2-b_2 c_1\right) a_2-\left(b_3 c_1-b_1 c_3\right) a_3\right] \boldsymbol{i} } \\ & +\left[\left(b_2 c_3-b_3 c_2\right) a_3-\left(b_1 c_2-b_2 c_1\right) a_1\right] \boldsymbol{j} \\ & +\left[\left(b_3 c_1-b_1 c_3\right) a_1-\left(b_2 c_3-b_3 c_2\right) a_2\right] \boldsymbol{k} \\ = & {\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_1-\left(a_1 b_1+a_2 b_2+a_3 b_3\right) c_1\right] \boldsymbol{i} } \\ & +\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_2-\left(a_1 b_1+a_2 b_2+a_3 b_3\right) c_2\right] \boldsymbol{j} \\ & +\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_3-\left(a_1 b_1+a_2 b_2+a_3 b_3\right) c_3\right] \boldsymbol{k} \\ = & \left(a_1 c_1+a_2 c_2+a_3 c_3\right)\left(b_1 \boldsymbol{i}+b_2 \boldsymbol{j}+b_3 \boldsymbol{k}\right) \\ & -\left(a_1 b_1+a_2 b_2+a_3 b_3\right)\left(c_1 \boldsymbol{i}+c_2 \boldsymbol{j}+c_3 \boldsymbol{k}\right) \\ = & (\boldsymbol{a} \cdot \boldsymbol{c}) \boldsymbol{b}-(\boldsymbol{a} \cdot \boldsymbol{b}) \boldsymbol{c} . \end{aligned} \]
\[ \begin{aligned} (\boldsymbol{a} \times\boldsymbol{b}) \times \boldsymbol{c}= & {\left[\left(b_1 a_3-b_3 a_1\right) c_3-\left(a_1 b_2-b_1 a_2\right) c_2\right] \boldsymbol{i} } \\ & +\left[\left(a_1 b_2-a_2 b_1\right) c_1-\left(a_2 b_3-b_2 a_3\right) c_3\right] \boldsymbol{j} \\ & +\left[\left(b_3 a_2-b_2 a_3\right) c_2-\left(b_1 a_3-b_3 a_1\right) c_1\right] \boldsymbol{k} \\ = & {\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_1-\left(c_1 b_1+c_2 b_2+c_3 b_3\right) a_1\right] \boldsymbol{i} } \\ & +\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_2-\left(c_1 b_1+c_2 b_2+c_3 b_3\right) a_2\right] \boldsymbol{j} \\ & +\left[\left(a_1 c_1+a_2 c_2+a_3 c_3\right) b_3-\left(c_1 b_1+c_2 b_2+c_3 b_3\right) a_3\right] \boldsymbol{k} \\ = & \left(a_1 c_1+a_2 c_2+a_3 c_3\right)\left(b_1 \boldsymbol{i}+b_2 \boldsymbol{j}+b_3 \boldsymbol{k}\right) \\ & -\left(c_1 b_1+c_2 b_2+c_3 b_3\right)\left(a_1 \boldsymbol{i}+a_2 \boldsymbol{j}+a_3 \boldsymbol{k}\right) \\ = & (\boldsymbol{a} \cdot \boldsymbol{c}) \boldsymbol{b}-(\boldsymbol{b} \cdot \boldsymbol{c}) \boldsymbol{a} . \square \end{aligned} \]
哈密顿算子的运算方式 \[ \nabla u=\left(\vec{i} \frac{\partial}{\partial x}+\vec{j} \frac{\partial}{\partial y}+\vec{k} \frac{\partial}{\partial z}\right) u=\frac{\partial u}{\partial x} \vec{i}+\frac{\partial u}{\partial y} \vec{j}+\frac{\partial u}{\partial z} \vec{k} \]
\[ \begin{aligned} \nabla \cdot \vec{A} & =\left(\vec{i}\frac{\partial}{\partial x}+\vec{j}\frac{\partial}{\partial y}+\vec{k} \cdot \frac{\partial}{\partial z}\right) \cdot\left(A_x \vec{i}+A_y \vec{j}+A_z \vec{k}\right) \\ & =\frac{\partial A_x}{\partial x}+\frac{\partial A_y}{\partial y}+\frac{\partial A_x}{\partial z} \end{aligned} \]
\[ \begin{aligned} \nabla \times \vec{A} & =\left|\begin{array}{ccc} \vec{i} & \vec{j} & \vec{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ A_x & A_y & A_z \end{array}\right| \\ & =\left(\frac{\partial A_z}{\partial y}-\frac{\partial A_y}{\partial z}\right) \vec{i}+\left(\frac{\partial A_x}{\partial z}-\frac{\partial A_z}{\partial x}\right) \vec{i}+\left(\frac{\partial A_y}{\partial x}-\frac{\partial A_x}{\partial y}\right) \vec{k} \end{aligned} \]
\[ \begin{aligned} \vec{A} \cdot \nabla & =\left(A_x \vec{i}+A_y \vec{j}+A_z \vec{k}\right) \cdot\left(\vec{i} \frac{\partial}{\partial x}+\vec{j} \frac{\partial}{\partial y}+\vec{k}\frac{\partial}{\partial z}\right) \\ & =A_x \frac{\partial}{\partial x}+A_y\frac{\partial}{\partial y}+A_z \frac{\partial}{\partial z} \end{aligned} \]
哈密顿算子的一些定理
\(\nabla(\vec{A}\cdot \vec{B})= \vec{A}\times(\nabla \times \vec{B})+(\vec{A}\cdot\nabla)\vec{B}+\vec{B}\times(\nabla \times \vec{A})+(\vec{B}\cdot\nabla)\vec{A}\)
证明 由于哈密顿算子本身是一种偏微分的缩写,所以其应当具有线性运算的性质。另外,二重叉积可以转化为点积,因为 \[ \vec{u}\times(\vec{v}\times\vec{w})=(\vec{u}\cdot\vec{w})\vec{v}-(\vec{u}\cdot\vec{v})\vec{w}\\ (\vec{u}\times\vec{v})\times\vec{w}=(\vec{u}\cdot\vec{w})\vec{v}-(\vec{w}\cdot\vec{v})\vec{u} \]
故而,以下属性成立
从而,其证明过程如下图
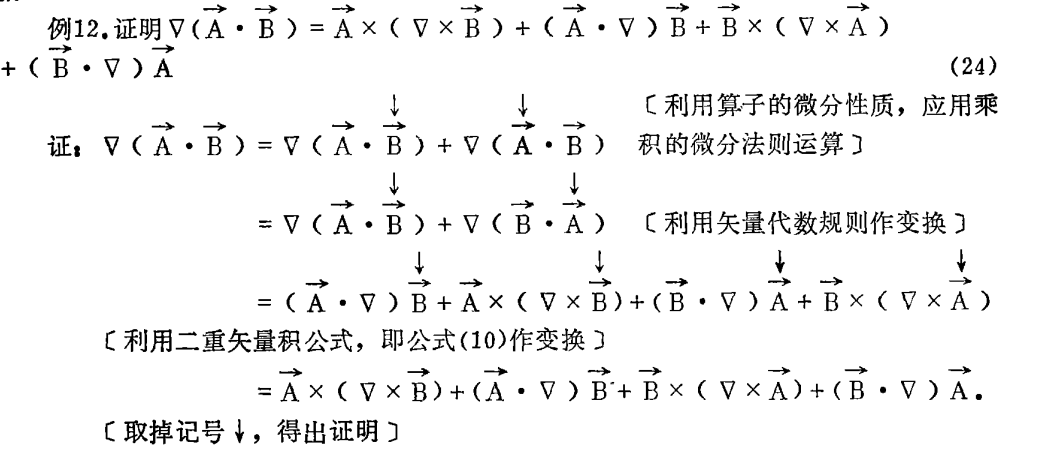
这里之所以可以取出向下的箭头是因为观察上面的定理发现,如果函数只有一个项,则定理的两边可以等同,所以箭头可以去掉。
多元函数积分学
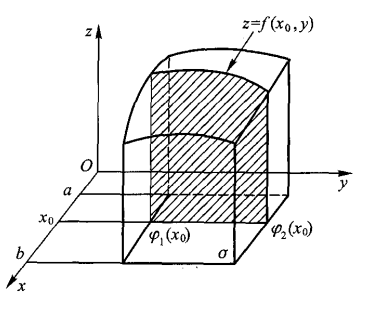
- (二重积分基本定义)设\(\sigma\)为一平板,其各点的密度为\(f(x,y)\),则其质量为\(M=\lim_{\lambda \to 0} \sum^{n}_{i=1} f(x_i,y_i)\Delta \sigma_i\),将这个极限值称为函数\(f(x,y)\)在区域\(\sigma\)上的二重积分,记作\(\iint_\sigma f(x,y)d\sigma\)
- (二重积分基本定理)若\(f(x,y)\)在有界闭区域\(\sigma\)上连续,则\(f(x,y)\)在\(\sigma\)上可积。
- (二重积分的计算)如下图的物体,其计算公式为
\[ \begin{aligned} V=\iint_\sigma f(x, y) \mathrm{d} \sigma & =\int_a^b A(x) \mathrm{d} x=\int_a^b\left[\int_{\varphi_1(x)}^{\varphi_2(x)} f(x, y) \mathrm{d} y\right] \mathrm{d} x \\ & \triangleq \int_a^b \mathrm{~d} x \int_{\varphi_1(x)}^{\varphi_2(x)} f(x, y) \mathrm{d} y . \end{aligned} \]
第二类曲线积分
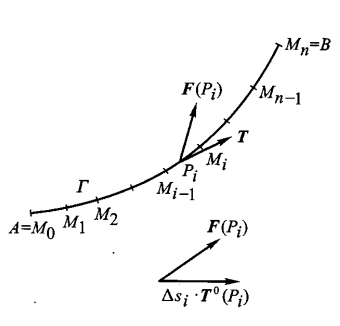
(第二类曲线积分的定义)设\(\Gamma\)是以A,B为端点的光滑曲线,并指定从A到B的曲线方向,在\(\Gamma\)上每一点M处作曲线的单位切矢量 \[ \boldsymbol{T}^0(M)=cos\alpha \boldsymbol{i}+cos\beta \boldsymbol{j}+cos\gamma \boldsymbol{k} \] 其方向与指定的曲线方向一致,又设 \[ \boldsymbol{A}(M)=\boldsymbol{A}(x, y, z)=P(x, y, z) \boldsymbol{i}+Q(x, y, z) \boldsymbol{j}+R(x, y, z) \boldsymbol{k} \] 其中,P,Q,R是定义在曲线\(\Gamma\)上的有界函数,则函数 \[ \boldsymbol{A} \cdot \boldsymbol{T}^0=P \cos \alpha+Q \cos \beta+R \cos \gamma \] 在曲线\(\Gamma\)上的第一类曲线积分 \[ \int_{\Gamma} \boldsymbol{A} \cdot \boldsymbol{T}^0 \mathrm{~d} s=\int_{\Gamma}(P \cos \alpha+Q \cos \beta+R \cos \gamma) \mathrm{d} s \] 称为函数\(A(P)=A(x,y,z)\)沿曲线\(\Gamma\)从A到B的第二类曲线积分。这里的\(A(P)\)可以借助下图的力场\(F(P_i)\)来理解。
(第二类曲线积分的性质)
(1)第二类曲线积分可以以四种型式出现,即 \[ \begin{aligned} \int_{I_{A B}} \boldsymbol{A} \cdot \boldsymbol{T}^0 \mathrm{~d} s & =\int_{I_{A B}} \boldsymbol{A} \cdot \mathrm{d} s=\int_{I_{A B}}(P \cos \alpha+Q \cos \beta+R \cos \gamma) \mathrm{d} s \\ & =\int_{I_{A B}} P \mathrm{~d} x+Q \mathrm{~d} y+R \mathrm{~d} z \end{aligned} \] (2)又,显然,\(\int_{\Gamma_{A B}}\left(\boldsymbol{A} \cdot \boldsymbol{T}^0\right) \mathrm{d} s=-\int_{\Gamma_{B A}}\left(\boldsymbol{A} \cdot \boldsymbol{T}^0\right) \mathrm{d} s\)
(3)若有向曲线\(\Gamma\)是由有向曲线\(\Gamma_1,\Gamma_2\)首尾衔接而成,则 \[ \int_{\Gamma}\left(\boldsymbol{A} \cdot \boldsymbol{T}^0\right) \mathrm{d} s=\int_{\Gamma_1}\left(\boldsymbol{A} \cdot \boldsymbol{T}^0\right) \mathrm{d} s+\int_{\Gamma_2}\left(\boldsymbol{A} \cdot \boldsymbol{T}^0\right) \mathrm{d} s \]
(第二类曲线积分的计算)定理 设光滑曲线\(\Gamma_{AB}\)的方程为:\(\left\{\begin{array}{l}x=x(t) \\ y=y(t) \\ z=z(t)\end{array}\right.\),点A对应的参数为\(t_A\),点B对应的参数为\(t_B\)(\(t_A,t_B\)谁大谁小不受限制),且函数\(A(x,y,z)=(P(x,y,z),Q(x,y,z),R(x,y,z))\)的分量\(P,Q,R\)在\(\Gamma\)上连续,则 \[ \begin{aligned} \int_{\Gamma_{A B}} \boldsymbol{A} \cdot \boldsymbol{T}^0 \mathrm{~d} s= & \int_{\Gamma_{A B}} \boldsymbol{A} \cdot \mathrm{d} s \\ = & \int_{\Gamma_{A B}}(P \cos \alpha+Q \cos \beta+R \cos \gamma) \mathrm{d} s=\int_{\Gamma_{A B}} P \mathrm{~d} x+Q \mathrm{~d} y+R \mathrm{~d} z \\ = & \int_{t_A}^{t_B} P(x(t), y(t), z(t)) x^{\prime}(t) \mathrm{d} t+\int_{t_A}^{t_B} Q(x(t), y(t), z(t)) y^{\prime}(t) \mathrm{d} t+ \\ & \int_{t_A}^{t_B} R(x(t), y(t), z(t)) z^{\prime}(t) \mathrm{d} t \\ = & \int_{t_A}^{t_B}\left[P \left(x(t), y(t), z(t), x^{\prime}(t)+Q(x(t), y(t), z(t)) y^{\prime}(t)+\right.\right. \\ & \left.R(x(t), y(t), z(t)) z^{\prime}(t)\right] \mathrm{d} t \end{aligned} \]
(格林公式)若函数\(P、Q\)在有界闭区域\(D \subset \boldsymbol{R}^2\)上连续且具有一阶连续偏导数,则
\[ \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y \] 或写作 \[ \iint_D\left|\begin{array}{ll} \frac{\partial}{\partial x} & \frac{\partial}{\partial y} \\ P & Q \end{array}\right| \mathrm{d} x \mathrm{~d} y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y . \] 这里\(\Gamma\)为区域D的边界曲线,并取正向(当人沿边界行走时,区域D总在他的右边)。
证明 根据区域D的不同形状,分三种情况来证
(i)若区域D既是x-型区域又是y-型区域,如下图,
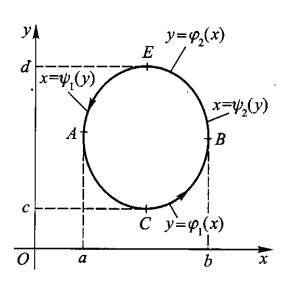
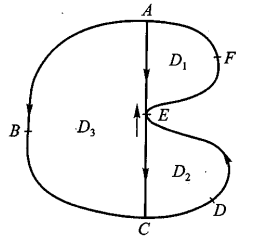
这时区域D可表示为 \[ \varphi_1(x) \leqslant y \leqslant \varphi_2(x), a \leqslant x \leqslant b\ \ \ \ \text { 或 } \quad \psi_1(y) \leqslant x \leqslant \psi_2(y), c \leqslant y \leqslant d \text {, } \] 这里\(y=\varphi_1(x)\)和\(y=\varphi_2(x)\)分别是曲线\(\overparen{A C B}\)和\(\overparen{B E A}\)的方程,而\(x=\psi_1(y)\)和\(x=\psi_2(y)\)分别是曲线\(\overparen{E A C}\)和\(\overparen{C B E}\)的方程,于是 \[ \begin{aligned} & \iint_D \frac{\partial Q}{\partial x} \mathrm{~d} x \mathrm{~d} y=\int_c^d \mathrm{~d} y \int_{\psi_1(y)}^{\psi_2(y)} \frac{\partial Q}{\partial x} \mathrm{~d} x=\int_c^d Q\left(\psi_2(y), y\right) \mathrm{d} y-\int_c^d Q\left(\psi_1(y), y\right) \mathrm{d} y \\ & =\int_{\overparen{C B E}} Q(x, y) \mathrm{d} y-\int_{\overparen{C A E}} Q(x, y) \mathrm{d} y=\int_{\overparen{C B E}} Q(x, y) \mathrm{d} y+\int_{\overparen{E A C}} Q(x, y) \mathrm{d} y \\ & =\oint_{\overparen{C B E A C}} Q(x, y) \mathrm{d} y=\oint_{\Gamma} Q(x, y) \mathrm{d} y(\text { 令 } \Gamma=\overparen{C B E A C}) \\ & \iint_D \frac{\partial P}{\partial y} \mathrm{~d} x \mathrm{~d} y=-\int_a^b \mathrm{~d} x \int_{\varphi_1(x)}^{\varphi_2(x)} \frac{\partial P}{\partial y} \mathrm{~d} y=-\int_a^b P\left(x, \varphi_2(x)\right) \mathrm{d} x+\int_a^b P\left(x, \varphi_1(x)\right) \mathrm{d} x \\ & =-\int_{\overparen{A E B}} P(x, y) \mathrm{d} x+\int_{\overparen{A C B}} P(x, y) \mathrm{d} x=\int_{\overparen{B E A}} P(x, y) \mathrm{d} x+\int_{\overparen{A C B}} P(x, y) \mathrm{d} x \\ & =\oint_{\overparen{B E A C B}} P(x, y) \mathrm{d} x=\oint_{\Gamma} P(x, y) \mathrm{d} x(\text { 令 } \Gamma=\overbrace{B E A C B}) \text {, } \end{aligned} \] 因此, \[ \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y \] (2)若区域D是由一条按段光滑闭曲线\(\Gamma\)围成,则用几段光滑曲线将D分成有限个既是x-型区域又是y-型区域的区域。然后逐块用(1)中的方法推得格林公式,再相加就可以得到格林公式区域的共同边界,因取向相反,它们的积分值正好互相抵消。如下图
 \[
\begin{aligned}
& \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y \\
& =\iint_{D_1}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d}
y+\iint_{D_2}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d}
y+\iint_{D_3}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y \\
& =\oint_{\overparen{E F A E}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{C D E C}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{A B C E A}} P \mathrm{~d} x+Q \mathrm{~d} y \\
& =\oint_{\overparen{E F A B C D E}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{C E A}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{A E C}} P \mathrm{~d} x+Q \mathrm{~d}
y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y . \\
&
\end{aligned}
\] (3)若区域D 由几条曲线所围成,如下图,\(\Gamma=\Gamma_1+\Gamma_2+\Gamma_3\),连接\(AB、CE\),则D的边界曲线为\(AB,\Gamma,BA,AC,CE,\Gamma_2,EC,CGA\)。而由(2)知
\[
\begin{aligned}
& \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=\int_{\overline{A
B}+\Gamma_3+\overline{B A}+\overparen{A C}+\overline{C
E}+\Gamma_2+\overline{E C}+\overparen{C G A}} P \mathrm{~d} x+Q
\mathrm{~d} y \\
= & \oint_{\Gamma_1+\Gamma_2+\Gamma_3} P \mathrm{~d} x+Q \mathrm{~d}
y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y . \square
\end{aligned}
\]
\[
\begin{aligned}
& \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y \\
& =\iint_{D_1}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d}
y+\iint_{D_2}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d}
y+\iint_{D_3}\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y \\
& =\oint_{\overparen{E F A E}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{C D E C}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{A B C E A}} P \mathrm{~d} x+Q \mathrm{~d} y \\
& =\oint_{\overparen{E F A B C D E}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{C E A}} P \mathrm{~d} x+Q \mathrm{~d}
y+\oint_{\overparen{A E C}} P \mathrm{~d} x+Q \mathrm{~d}
y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y . \\
&
\end{aligned}
\] (3)若区域D 由几条曲线所围成,如下图,\(\Gamma=\Gamma_1+\Gamma_2+\Gamma_3\),连接\(AB、CE\),则D的边界曲线为\(AB,\Gamma,BA,AC,CE,\Gamma_2,EC,CGA\)。而由(2)知
\[
\begin{aligned}
& \iint_D\left(\frac{\partial Q}{\partial x}-\frac{\partial
P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=\int_{\overline{A
B}+\Gamma_3+\overline{B A}+\overparen{A C}+\overline{C
E}+\Gamma_2+\overline{E C}+\overparen{C G A}} P \mathrm{~d} x+Q
\mathrm{~d} y \\
= & \oint_{\Gamma_1+\Gamma_2+\Gamma_3} P \mathrm{~d} x+Q \mathrm{~d}
y=\oint_{\Gamma} P \mathrm{~d} x+Q \mathrm{~d} y . \square
\end{aligned}
\] 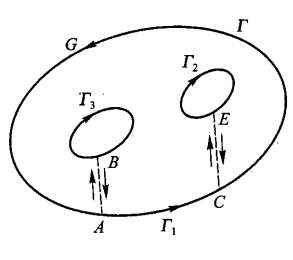
解释:(2)之所以如此做,重点在于可能出现一个自变量会对应两个函数值,这样子就没法在一个函数下进行积分了。因此这里的核心首要的还不是在光滑不光滑,而是在于类似\(\int_c^d Q\left(\psi_2(y), y\right)\)这样的形式中,\(\psi_2(y)\)失去了作为函数的必要条件。(3)实际上是写得简略,其中各个线段(\(\Gamma_3,\Gamma_2,\Gamma\))还是要进行分割的。所以(2)和(3)同样都是在分段进行积分,最后为着能完满为一个圆,只是(2)表面看上去好像在做分块一样。
平面单连通区域:若平面区域\(D\)内任一封闭曲线所包围的区域均包含于\(D\)内,则这个“没有洞”的区域称为平面单连通区域。
(平面曲线积分与路径无关性)设\(D\subset \boldsymbol{R}^2\)是平面单连通区域,若函数\(P,Q\)在区域\(\boldsymbol{D}\)上连续,且具有一阶连续偏导数,则以下四个条件等价:
(1)沿\(\boldsymbol{D}\)中任一段光滑曲线\(L\),有\(\oint_L P \mathrm{~d} x+Q \mathrm{~d} y=0\);
(2)对\(\boldsymbol{D}\)中任一按段光滑曲线\(L\),曲线积分\(\oint_L P \mathrm{~d} x+Q \mathrm{~d} y\)与路径无关,只与\(L\)的起点和终点有关;
(3)\(Pdx+Qdy\)是\(\boldsymbol{D}\)内某一函数\(u\)的全微分,即在\(\boldsymbol{D}\)内存在一个二元函数\(u(x,y)\),使\(du=Pdx+Qdy\),即\(\frac{\partial u}{\partial x}=P,\frac{\partial u}{\partial y}=Q\);
(4)在\(\boldsymbol{D}\)内每一点处,有\(\frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x}\)
证
\((1)\Rightarrow(2).\)
设\(\overparen{A R B}\)与\(\overparen{A S B}\)为联结点\(A,B\)的任意两条光滑曲线,由(1)得 \[ \begin{aligned} \int_{\overparen{A R B}} P \mathrm{~d} x+Q \mathrm{~d} y-\int_{\overparen{A S B}} P \mathrm{~d} x+Q \mathrm{~d} y & =\int_{\overparen{A R B}} P \mathrm{~d} x+Q \mathrm{~d} y+\int_{\overparen{B S A}} P \mathrm{~d} x+Q \mathrm{~d} y \\ & =\oint_{\overparen{A R B S A}} P \mathrm{~d} x+Q \mathrm{~d} y=0 \end{aligned} \] 所以 \[ \int_{\overparen{A R B}} P \mathrm{~d} x+Q \mathrm{~d} y=\int_{\overparen{A S B}} P \mathrm{~d} x+Q \mathrm{~d} y \]
\((2)\Rightarrow(3)\).
设\(A(x_0,y_0)\)为\(\boldsymbol{D}\)内某定点,\(B(x,y)\)为\(\boldsymbol{D}\)内任意一点。由(2),曲线积分\(\int_{\overparen{A B}} P \mathrm{~d} x+Q \mathrm{~d} y\)与路径的选择无关,故当\(B(x,y)\)在\(\boldsymbol{D}\)内变动时,其积分值是点\(B(x,y)\)的函数,即有 \[ u(x,y)=\int_{\overparen{A B}} P \mathrm{~d} x+Q \mathrm{~d} y \] 取\(\Delta x\)充分小,使\(C(x+\Delta x,y)\in \boldsymbol{D}\),则函数\(u\)对于\(x\)的偏增量: \[ u(x+\Delta x ; y)-u(x, y)=\int_{\overparen{A C}} P \mathrm{~d} x+Q \mathrm{~d} y-\int_{\overparen{A B}} P \mathrm{~d} x+Q \mathrm{~d} y . \] 因为在\(\boldsymbol{D}\)内,曲线积分与路径无关,所以 \[ \int_{\overparen{A C}} P \mathrm{~d} x+Q \mathrm{~d} y=\int_{\overparen{A B}} P \mathrm{~d} x+Q \mathrm{~d} y+\int_{\overparen{B C}} P \mathrm{~d} x+Q \mathrm{~d} y . \] 由于直线段\(BC\)平行于\(x\)轴,所以\(BC:x=t, t\in [x,x+\Delta x],y=y(常数)\),因而\(dy=0\),且 \[ \Delta u=u(x+\Delta x, y)-u(x, y)=\int_{\overparen{B C}} P \mathrm{~d} x+Q \mathrm{~d} y=\int_x^{x+\Delta x} P(t, y) \mathrm{d} t . \] 对上式右端应用积分中值定理,得 \[ \Delta u=P(x+\theta \Delta x, y) \Delta x, 0<\theta<1 \] 再依\(P\)在\(\boldsymbol{D}\)上的连续性,得 \[ \frac{\partial u}{\partial x}=\lim _{\Delta x \rightarrow 0} \frac{\Delta u}{\Delta x}=\lim _{\Delta x \rightarrow 0} P(x+\theta \Delta x, y)=P(x, y) . \] 同理可得\(\frac{\partial u}{\partial x}=Q(x,y)\)。于是有 \[ du=Pdx+Qdy \] \((3)\Rightarrow(4)\).
设存在函数\(u\),使得 \[ \mathrm{d} u=u_x^{\prime}(x, y) \mathrm{d} x+u_y^{\prime}(x, y) \mathrm{d} y=P \mathrm{~d} x+Q \mathrm{~d} y \] 故 \[ P(x, y)=u_x^{\prime}(x, y), \quad Q(x, y)=u_y^{\prime}(x, y) \]
\[ \therefore \quad \frac{\partial P}{\partial y}=\frac{\partial^2 u}{\partial x \partial y}, \quad \frac{\partial Q}{\partial x}=\frac{\partial^2 u}{\partial y \partial x} \]
因为\(P,Q\)在区域\(\boldsymbol{D}\)内具有一阶连续偏导数,所以 \[ \frac{\partial^2 u}{\partial x \partial y}=\frac{\partial^2 u}{\partial y \partial x} \] 从而在\(\boldsymbol{D}\)内每一点都有\(\frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x}\)
\((4)\Rightarrow(1)\).
设\(L\)为\(\boldsymbol{D}\)中任一按段光滑闭曲线,记\(L\)所围的区域为\(\sigma\),由于\(D\)内恒有\(\frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x}\),应用格林公式就得到 \[ \pm\iint_\sigma\left(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=\oint_{L} P \mathrm{~d} x+Q \mathrm{~d} y=0 \]
(斯托克斯公式)设光滑曲面S的边界L是按段光滑的连续曲线,若函数\(P,Q,R\)在\(S\)(连同\(L\))上连续,且具有一阶连续偏导数,则 \[ \begin{aligned} & \iint_S\left(\frac{\partial R}{\partial y}-\frac{\partial Q}{\partial z}\right) \mathrm{d} y \mathrm{~d} z+\left(\frac{\partial P}{\partial z}-\frac{\partial R}{\partial x}\right) \mathrm{d} z \mathrm{~d} x+\left(\frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right) \mathrm{d} x \mathrm{~d} y \\ = & \oint_L P \mathrm{~d} x+Q \mathrm{~d} y+R \mathrm{~d} z . \end{aligned} \] 也可写作 \[ \iint_s\left|\begin{array}{ccc} \mathrm{d} y \mathrm{~d} z & \mathrm{~d} z \mathrm{~d} x & \mathrm{~d} x \mathrm{~d} y \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ P & Q & R \end{array}\right|=\oint_L P \mathrm{~d} x+Q \mathrm{~d} y+R \mathrm{~d} z . \] 其中\(S\)的侧面与\(L\)的方向按右手法则(见下图)确定。
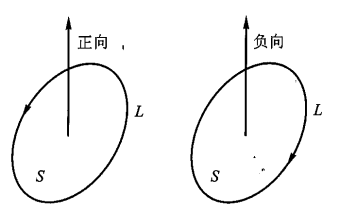
证 先证 \[ \iint_S \frac{\partial P}{\partial z} \mathrm{~d} z \mathrm{~d} x-\frac{\partial P}{\partial y} \mathrm{~d} x \mathrm{~d} y=\oint_L P \mathrm{~d} x \] 其中曲面\(S\)由方程\(z=z(x,y)\)确定,它的正侧法线方向数为\((-z_x',-z_y',1)\)(即法矢量与\(OE\)轴正向夹角为锐角),单位矢量为\(\left(\frac{-z_x^{\prime}}{\sqrt{1+z_x^{\prime 2}+z_y^{\prime 2}}}, \frac{-z_y^{\prime}}{\sqrt{1+z_x^{\prime 2}+z_y^{\prime 2}}},\frac{1}{\sqrt{1+z_x^{\prime 2}+z_y^{\prime 2}}}\right)\),又方向余弦为\((cos\alpha,cos\beta,cos\gamma)\),得\(cos\alpha=\frac{-\partial z}{\partial x}cos\gamma,cos\beta=\frac{-\partial z}{\partial y}cos\gamma\),而\(cos\gamma=\frac{1}{\sqrt{1+z_x^{\prime 2}+z_y^{\prime 2}}}\),所以 \[ \frac{\partial z}{\partial x}=-\frac{\cos \alpha}{\cos \gamma}, \quad \frac{\partial z}{\partial y}=-\frac{\cos \beta}{\cos \gamma} \] 若\(S\)在\(Oxy\)平面上的投影区域为\(D_xy\),\(L\)在\(Oxy\)平面上的投影曲线记为\(\Gamma\),现由第二类曲线积分定义及格林公式有 \[ \oint_L P(x, y, z) \mathrm{d} x=\oint_{\Gamma} P(x, y, z(x, y)) \mathrm{d} x=-\iint_{D_{s y}} \frac{\partial}{\partial y} P\left(x, y, z\left(x, y\right)\right) \mathrm{d} x \mathrm{~d} y, \] 因为 \[ \frac{\partial}{\partial y} P(x, y, z(x, y))=\frac{\partial P}{\partial y}+\frac{\partial P}{\partial z} \frac{\partial z}{\partial y} \] 所以 \[ -\iint_{D_{x y}} \frac{\partial}{\partial y} P(x, y, z(x, y)) \mathrm{d} x \mathrm{~d} y=-\iint_{D_{x y}}\left(\frac{\partial P}{\partial y}+\frac{\partial P}{\partial z} \frac{\partial z}{\partial y}\right) \mathrm{d} x \mathrm{~d} y . \] 从而 \[ \begin{aligned} \text { 原式 } & =-\iint_S\left(\frac{\partial P}{\partial y}+\frac{\partial P}{\partial z} \frac{\partial z}{\partial y}\right) \mathrm{d} x \mathrm{~d} y=-\iiint_S\left(\frac{\partial P}{\partial y}-\frac{\partial P}{\partial z} \frac{\cos \beta}{\cos \gamma}\right) \mathrm{d} x \mathrm{~d} y \\ & =-\iint_S\left(\frac{\partial P}{\partial y} \cos \gamma-\frac{\partial P}{\partial z} \cos \beta\right) \frac{\mathrm{d} x \mathrm{~d} y}{\cos \gamma}=-\iint_S\left(\frac{\partial P}{\partial y} \cos \gamma-\frac{\partial P}{\partial z} \cos \beta\right) \mathrm{d} S \\ & =\iint_S \frac{\partial P}{\partial z} \mathrm{~d} z \mathrm{~d} x-\frac{\partial P}{\partial y} \mathrm{~d} x \mathrm{~d} y . \end{aligned} \] 综上所述,并对\(x=x(y,z),y=y(z,x)\)进行推广,就可得证。(关于斯托克斯公式的物理含义,可以参看知乎的回答“斯托克斯公式的意义?”,简单来讲就是说对于一个向量场来说,其曲面内部各微元的旋度与微元的面积内积后的总和等于曲面边界上的环量。)
(旋度)现考虑一个\(XY\)平面内的平行x轴放置的正方形微元(各边为\(dx,dy\)),其各点的向量场强度(线性增加)分别为\((E_x,E_y),(E_x+dE_x,E_y),(E_x,E_y+dE_y),(E_x+dE_x,E_y+dE_y)\),那么进行一个环形的积分就可以得到该向量场在这一圈中是否有做功,也就是是否有旋度,积分的结果为 \[ \frac{\partial E_y}{\partial x}-\frac{\partial E_x}{\partial y}dxdy. \] 将这个二维的结果推广到三维。
设\(\boldsymbol{A}(x,y,z)=(P(x,y,z),Q(x,y,z),R(x,y,z))\)为空间区域\(V\)上的向量函数,对\(V\)上的一点\(M(x,y,z)\),定义向量函数\(\left(\frac{\partial R}{\partial y}-\frac{\partial Q}{\partial z}, \frac{\partial P}{\partial z}-\frac{\partial R}{\partial x}, \frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right)\),称它为向量函数\(\boldsymbol{A}\)在点\(M(x,y,z)\)处的旋度,记作\(\boldsymbol{\operatorname{rot}}\boldsymbol{A}\),为便于记忆,也可写作 \[ \boldsymbol{\operatorname{rot}}\boldsymbol{A}=\left|\begin{array}{ccc} \boldsymbol{i} & \boldsymbol{j} & \boldsymbol{k} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\ P & Q & R \end{array}\right| \] 设\(\boldsymbol{T}^0\)是曲线\(L\)上在点\(M(x,y,z)\)处与指定的方向一致的单位切线向量,向量\(d\boldsymbol{s}=\boldsymbol{T}^0ds\)称为弧长元素向量,于是斯托克斯公式可写成如下的向量形式: \[ \iint_S \boldsymbol{\operatorname{rot}}\boldsymbol{A} \cdot \mathrm{d} \boldsymbol{S}=\oint_L \boldsymbol{A} \cdot \mathrm{d} \boldsymbol{s} . \] 在\(\boldsymbol{\operatorname{rot}}\boldsymbol{A}=0\)时,称向量场\(\boldsymbol{A}\)为无旋场。
(空间曲线积分与路径无关性)在6、7、8的基础上,我们可以得到以下重要定理:
设\(\Omega \subset \boldsymbol{R}^3\)为空间线单连通区域,若函数\(P,Q,R\)在\(\Omega\)上连续,且具有一阶连续偏导数,则以下四个条件是等价的:
(1)对于\(\Omega\)内任一按段光滑的封闭曲线\(L\),有\(\oint_L P \mathrm{~d} x+Q \mathrm{~d} y+R\mathrm{~d}z=0;\)
(2)对\(\Omega\)内任一按段光滑曲线\(\Gamma\),曲线积分\(\oint_\Gamma P \mathrm{~d} x+Q \mathrm{~d} y+R\mathrm{~d}z\)与路径无关,只与起点和终点有关;
(3)\(P \mathrm{~d} x+Q \mathrm{~d} y+R\mathrm{~d}z\)是\(\Omega\)内某一函数\(u(x,y,z)\)的全微分,即在\(\Omega\)上存在一个函数\(u(x,y,z)\),使 \[ du=Pdx+Qdy+Rdz; \] (4)在\(\Omega\)内每一点处,有 \[ \frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x},\frac{\partial Q}{\partial z}=\frac{\partial R}{\partial y},\frac{\partial R}{\partial x}=\frac{\partial P}{\partial z} \] 注:在这里可以衍生出流体力学的定理,对于无旋流来说,因其 \[ \boldsymbol{\operatorname{rot}}\boldsymbol{A}=\left(\frac{\partial R}{\partial y}-\frac{\partial Q}{\partial z}, \frac{\partial P}{\partial z}-\frac{\partial R}{\partial x}, \frac{\partial Q}{\partial x}-\frac{\partial P}{\partial y}\right)=(0,0,0) \] 所以其 \[ \frac{\partial P}{\partial y}=\frac{\partial Q}{\partial x},\frac{\partial Q}{\partial z}=\frac{\partial R}{\partial y},\frac{\partial R}{\partial x}=\frac{\partial P}{\partial z} \] 所以,存在一个函数(势函数)\(\varphi\),满足 \[ d\varphi=Pdx+Qdy+Rdz; \] 也就是说 \[ \frac{\partial \varphi}{\partial x}=V_x \\ \frac{\partial \varphi}{\partial y}=V_y \\ \frac{\partial \varphi}{\partial z}=V_z \\ \] 最后就可以得到下面的势量场定理
(势量场定理)设势量场\(A(P)=P\boldsymbol{i}+Q\boldsymbol{j}+R\boldsymbol{k},P,Q,R\)在场中的线单连通区域\(D\)内具有连续的一阶偏导数,则在\(D\)内,下属四个断语是等价的:
(1)\(\boldsymbol{\operatorname{rot}}\boldsymbol{A}=0;\)
(2)\(\oint_L \boldsymbol{A} \cdot \mathrm{d} \boldsymbol{s} =0\),\(L\)是\(D\)内任意一条封闭曲线;
(3)线积分\(\oint_L \boldsymbol{A} \cdot \mathrm{d} \boldsymbol{s}\)与路径无关;
(4)\(\boldsymbol{\operatorname{rot}}\boldsymbol{A}\)是一个势量场.
参考文献
- 《微积分(下)》,高等教育出版社,第二版,苏德矿、吴明华主编
- “直观理解梯度,以及偏导数、方向导数和法向量等”,https://www.cnblogs.com/shine-lee/p/11715033.html
- “关于散度(divergence)和旋度(Curl)的公式推导”,https://www.cnblogs.com/heweiren-cheng/p/14757712.html)